- 软件



/中文/

/中文/

/中文/
/中文/

/中文/

/中文/

/中文/

/中文/

/中文/
/中文/
 7-zip下载v18.03 简体中文美化版
7-zip下载v18.03 简体中文美化版 Bubble Math(泡泡数学)v1.0 电脑版
Bubble Math(泡泡数学)v1.0 电脑版 EditPad Pro(多功能文本编辑器)v7.65 中文版
EditPad Pro(多功能文本编辑器)v7.65 中文版 彗星QQ资源文件读取器v2.1 绿色免费版
彗星QQ资源文件读取器v2.1 绿色免费版 ScanTransfer(无线传输工具)v2018 官方版
ScanTransfer(无线传输工具)v2018 官方版 Easy Equation Solver(在线方程式计算器)v1.8 官方版
Easy Equation Solver(在线方程式计算器)v1.8 官方版 动书编辑器(motionbook)v2018 官方版
动书编辑器(motionbook)v2018 官方版 Flash Renamer(批量重命名软件)v6.9 官方版
Flash Renamer(批量重命名软件)v6.9 官方版 字由客户端v2.0.0.4 官方版
字由客户端v2.0.0.4 官方版 Notepad2书签版(Notepad2 Bookmark Edition)v5.1 官方版
Notepad2书签版(Notepad2 Bookmark Edition)v5.1 官方版软件Tags:
Siemens Tecnomatix Jack是一款人机仿真软件,该软件主要针对人体对环境适应的效果仿真而开发,可以通过仿真技术得到人体在不同环境中会产生怎样的反应,从而得到与实际情况所发生相符的数据作为参考,支持在特定的条件下对人体进行模拟测试,分析出不同环境下人体的受损程度、安全威胁、生命特征、精力消耗状态以及身体承受极限等重要的数据,可以将其应用到航空航天、能源开采、恶劣环境作业等领域,需要的用户可以下载体验

自动抓
此功能提供了自动生成逼真范围和抓取的最简单方法为人类的姿态!
在新的人体控制面板中,您可以单击Jill的左侧或右手选择Grasp Segment或Grasp Figure。
从那里,单击一个对象在你希望你的人类掌握的场景中。
你会自动看到人类到达物体并将他/她的手环绕在您指定的点附近。
碰撞检测用于定义抓握姿势。
您也可以点击“调整掌握”微调产生的姿势。
支撑姿势
人们经常在执行任务时观察到对表面的支撑密歇根大学Humosim研究小组最近完成了一项关于该研究的研究
支撑面对姿势和力作用的影响这样的任务。
该研究的主要发现之一是实际用力方向可以包括影响生物力学的大量轴外部件装在图上。
杰克新的支撑姿势预测计算脚的位置,身体姿势和力量。
从人体控制面板,您可以加载特殊支撑图表指定手和大腿支架表面的位置。
另外,您可以指定足部限制区域,定义足部预测可以放置的限制图脚。
此外,杰克将会看到图中有什么手负载(如果有的话)并计算支撑面上的适当力,以及更新任务
根据研究的观察,手的力量大小和方向。
支撑姿势允许您在支撑场景中预测更逼真的姿势可能。
此外,支撑姿势会影响您的人体工程学分析,提供一个更真实地反映了作用于人类的力量。
任务模拟生成器(TSB)
结合过去几年收集的用户反馈,TSB非常重要,为v8.0进行了大修。
启动TSB时,您会注意到所有窗口都包含在一个窗口中用户界面,可以更轻松地查找功能并跟踪您正在处理的内容。
您不再需要在创作和分析模式之间切换。
这些概念已经存在结合使用,您可以随时创作,预览,编辑和评估您的模拟定义任务,您将看到“立即解决”按钮。
如果单击,这将自动解决操作你的任务,就像TSB一样。
但是,您也可以使用“下一个/后退”按钮操纵任务创作步骤以预览每个动作并根据需要进行编辑。
TSB还扩展到包括新任务类型,包括允许您使用的Regrasp任务修改人类持有物体的方式。
您也可以插入Sit或Stand任务在模拟过程中切换这些模式。
模拟创作经验应该从早期版本中得到很大改进,
使您可以轻松控制和可视化步行路径,调整范围并掌握任务的姿势,并定义中间姿势以微调你的姿势
人体控制小组
为了支持快速简单的数字姿态,系统整合了用于控制的各种对话框将该图转换为一个通用用户界面这包括传统的人工控制面板,
人体行为,调整关节,手势姿势对话,姿势图书馆,基于力量,姿势预测以及载荷和重量对话框。
TSB为新的人体工程学分析工具提供支持(任务分析的一部分工具包):
累计低背加载
此工具可让您考虑执行的所有任务需求的影响整个工作班次。
将结果与公布的阈值限制进行比较以进行分类受伤的可能性很低。
疲劳
实时疲劳和恢复工具已针对8.0版进行了重新设计并与之集成TSB。
它提供了a所经历的疲劳累积和恢复的估计模拟过程中的数字。
基于Rohmert疲劳方程,该工具在整个模拟过程中通过图中经历的关节应变来计算关节并将其与可用的总恢复时间进行比较。
最终报告表明是否任务序列可能会导致累积疲劳并提供指导纠正措施。
碰撞检测
“实用程序”菜单中提供了新的“碰撞检测”模块。碰撞检测是现在与JT数据兼容,并允许人类,原生杰克之间的接近检查几何和JT几何。
模块自动加载
过去,每次启动Jack会话时都必须加载插件模块。在v8.0中,现在可以选择模块并将其移动到“自动加载”列表。现在每次你推出杰克,
支持:场景导航和人体姿势。 导航会查看您的手臂姿势
通过现场操纵杰克(或吉尔)姿势模式跟踪你的身体姿势将这些映射到选定的杰克或吉尔图。
提供了有关此模块的更多信息在可以从Kinect模块用户界面访问的文档中。
支持Kinect传感器包含在基础产品中,但需要Kinect for Windows传感器。
1、下载并打开安装数据包,双击应用程序,进入安装界面

2、弹出安装界面窗口,阅读安装向导,点击下一步按钮进入下一安装界面

3、根据自己的需要选择组件进行程序安装
4、点击浏览按钮,选择安装应用程序文件夹,选择安装路径,然后点击下一步

5、点击浏览按钮选择安装文件夹创建名称,可以输入更改文件夹名称,然后点击下一步按钮

6、等待安装进度条加载完成
7、弹出完成安装界面,点击“完成”按钮即可
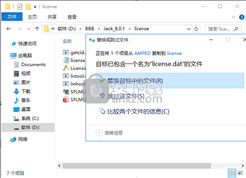
1、回到安装包,打开破解文件将license.dat文件复制到粘贴板

2、然后将其复制到程序安装目录,默认安装路径为:C:\Program Files\Siemens\Jack_8.0.1\license
3、继续打开程序,找到破解文件,将libjc.dll文件复制到安装路径,目录路径同上
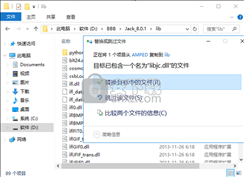
4、完成以上操作,即可完成程序破解
使用说明
1、在合并的人体控制面板中,您还将找到两个新的强大姿势

2、ack的未来版本仅作为64位应用程序提供。NVidia显卡可能会出现产生抗锯齿屏幕捕获的问题图像 - 生成的输出图像不会应用抗锯齿。

3、这可以纠正,进入驱动程序的高级图形设置并设置“Buffer Flipping”模式“到”使用块传输“。确保退出Jack并在进行此更改后重新启动是一个持久的设置,只需要做一次。

4、部分身体跟踪是一项将动作捕捉与姿势预测相结合的新功能简化运动跟踪场景,其中跟踪特定身体区域,如手臂,是利益

5、对于这些情况,部分身体跟踪将允许使用标记进行主题跟踪仅在感兴趣的身体区域,而未经训练的身体区域的位置使用预测全身姿势预测

6、只需使用手动标记即可跟踪数字集。可选地,可以添加肘部,上部躯干或头部位置信息。自部分身体跟踪需要更小的跟踪点集,设置时间可以显着与使用全身套装相比减少了。

 斯沃数控加工仿真软件机械电子 / 429.4M
斯沃数控加工仿真软件机械电子 / 429.4M
 NAPCB(彩色抄板软件)机械电子 / 6.6M
NAPCB(彩色抄板软件)机械电子 / 6.6M 立创eda软件机械电子 / 93.2M
立创eda软件机械电子 / 93.2M 斯沃数控加工仿真软件机械电子 / 429.4M
斯沃数控加工仿真软件机械电子 / 429.4M Altair FluxMotor 2021机械电子 / 286M
Altair FluxMotor 2021机械电子 / 286M NAPCB(彩色抄板软件)机械电子 / 6.6M
NAPCB(彩色抄板软件)机械电子 / 6.6M 立创eda软件机械电子 / 93.2M
立创eda软件机械电子 / 93.2M Altair FluxMotor 2021机械电子 / 286M
Altair FluxMotor 2021机械电子 / 286M altair inspire 2021破解版(结构分析) 附安装教程机械电子 / 2662 MB
altair inspire 2021破解版(结构分析) 附安装教程机械电子 / 2662 MB Altium Concord Pro 2021(电子元件管理工具) v4.0.1.34 破解版机械电子 / 2150 MB
Altium Concord Pro 2021(电子元件管理工具) v4.0.1.34 破解版机械电子 / 2150 MB 立创eda软件v6.4.20.6 官方版机械电子 / 45.9M斯沃数控加工仿真软件机械电子 / 429.4M
立创eda软件v6.4.20.6 官方版机械电子 / 45.9M斯沃数控加工仿真软件机械电子 / 429.4M win10eplan破解加密狗下载机械电子 / 1.10G
win10eplan破解加密狗下载机械电子 / 1.10G Antenna Magus破解版2020机械电子 / 1.83G
Antenna Magus破解版2020机械电子 / 1.83G 红外遥控编码分析仪机械电子 / 544KB
红外遥控编码分析仪机械电子 / 544KB 大宝剑串口助手机械电子 / 250KB
大宝剑串口助手机械电子 / 250KB 纸艺大师编辑器(Pepakura Designer)v4.2.4 中文版机械电子 / 17.0M
纸艺大师编辑器(Pepakura Designer)v4.2.4 中文版机械电子 / 17.0M 飞思卡尔烧写工具v13.03 绿色版机械电子 / 1.0M
飞思卡尔烧写工具v13.03 绿色版机械电子 / 1.0M FlashDLPrint(光固化技术切片软件)v2.1.4 官方版机械电子 / 20.3M
FlashDLPrint(光固化技术切片软件)v2.1.4 官方版机械电子 / 20.3M solidworks2019中文版(附教程)机械电子 / 10G
solidworks2019中文版(附教程)机械电子 / 10G










 dyned电脑版(戴耐德英语软件)教育学习
dyned电脑版(戴耐德英语软件)教育学习 360游戏大厅v3.8.7.1021 最新版游戏平台
360游戏大厅v3.8.7.1021 最新版游戏平台 tl wr710n升级固件v1.130415官方版路由器类
tl wr710n升级固件v1.130415官方版路由器类 数独计算器v1.2 免安装版教育学习
数独计算器v1.2 免安装版教育学习 播客录播助手v2.3.0.1 官方版屏幕录像
播客录播助手v2.3.0.1 官方版屏幕录像 My Secret Folder(文件夹加密工具)加密解密
My Secret Folder(文件夹加密工具)加密解密 蓝蚂蚁qq金牌网吧破解版20175.7 免费版其他应用
蓝蚂蚁qq金牌网吧破解版20175.7 免费版其他应用 加密魔镜加密解密
加密魔镜加密解密 鲁ICP备2021036634号-4
鲁ICP备2021036634号-4