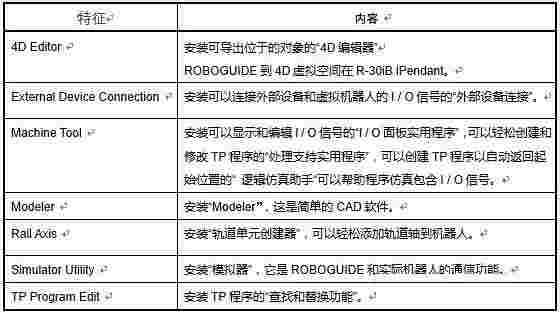
- 软件


/中文/

/中文/

/中文/

/中文/

/中文/

/中文/

/中文/

/中文/

/中文/

/中文/
 7-zip下载v18.03 简体中文美化版
7-zip下载v18.03 简体中文美化版 Bubble Math(泡泡数学)v1.0 电脑版
Bubble Math(泡泡数学)v1.0 电脑版 EditPad Pro(多功能文本编辑器)v7.65 中文版
EditPad Pro(多功能文本编辑器)v7.65 中文版 Easy Equation Solver(在线方程式计算器)v1.8 官方版
Easy Equation Solver(在线方程式计算器)v1.8 官方版 ScanTransfer(无线传输工具)v2018 官方版
ScanTransfer(无线传输工具)v2018 官方版 彗星QQ资源文件读取器v2.1 绿色免费版
彗星QQ资源文件读取器v2.1 绿色免费版 Flash Renamer(批量重命名软件)v6.9 官方版
Flash Renamer(批量重命名软件)v6.9 官方版 动书编辑器(motionbook)v2018 官方版
动书编辑器(motionbook)v2018 官方版 字由客户端v2.0.0.4 官方版
字由客户端v2.0.0.4 官方版 Notepad2书签版(Notepad2 Bookmark Edition)v5.1 官方版
Notepad2书签版(Notepad2 Bookmark Edition)v5.1 官方版软件Tags: 仿真软件发那科机器人仿真软件
发那科机器人仿真软件中文版是专为发那科机器人打造的仿真软件,让用户可以随时在电脑上面模拟机器人的运行,让用户用来学习和工作都非常的方便,软件可以完美模拟机器人的运作非常好用。
发那科机器人仿真软件通过建模,模拟实际运行场景,提前预判干涉、够不着等问题,并且能够生成实际运行的机器人程序,实现离线编程功能。
1)单击“运行setup.EXE”

2)显示“ROBOGUIDE BootStrapper Setup”窗口。
点击“安装”按钮。安装运行ROBOGUIDE所需的运行时库。

3)显示“ROBOGUIDE设置”窗口。 点击“下一步>”按钮。

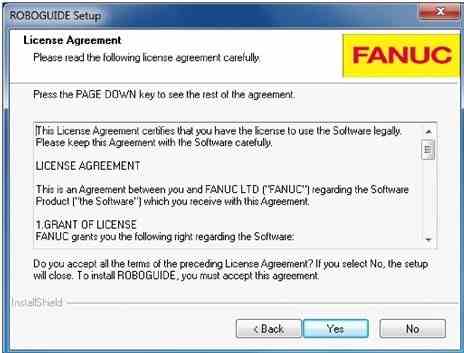
4)显示“ROBOGUIDE设置 - 许可协议”窗口。 请检查详细信息,然后单击“是”按钮。
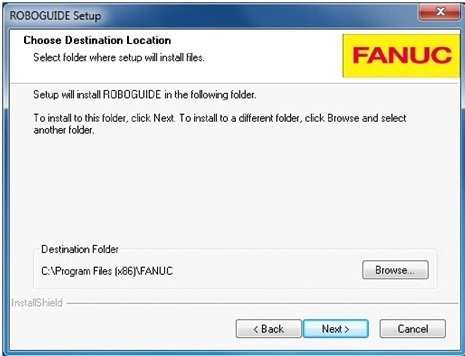
5)然后,显示“ROBOGUIDE设置选择目标位置”窗口。 安装路径显示在“目标文件夹”。如果要更改目标文件夹,请单击“浏览...”按钮,并指定目标文件夹。 指定目标文件夹后,单击“下一步>”按钮。
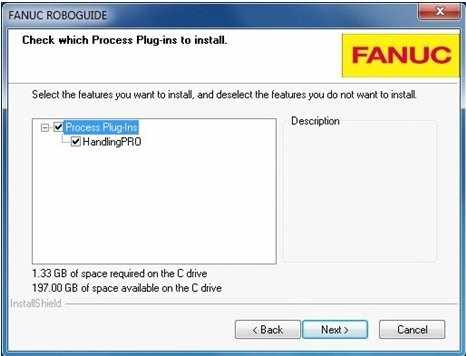
6)显示“FANUC ROBOGUIDE - 检查要安装的过程插件”窗口。 选择要安装的功能,然后单击“下一步”按钮。 这里可以选择的功能因您购买的选项而异。
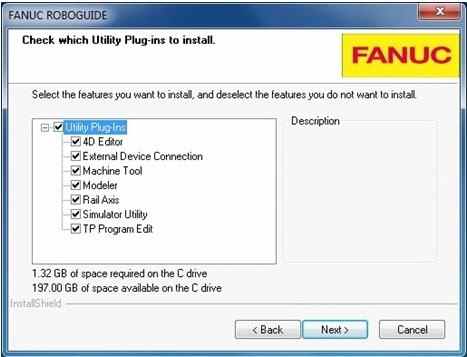
7)显示“FANUC ROBOGUIDE - 检查要安装的实用程序插件”窗口。 选择要安装的功能,然后单击“下一步”按钮。 这里可以选择的功能因您购买的选项而异。
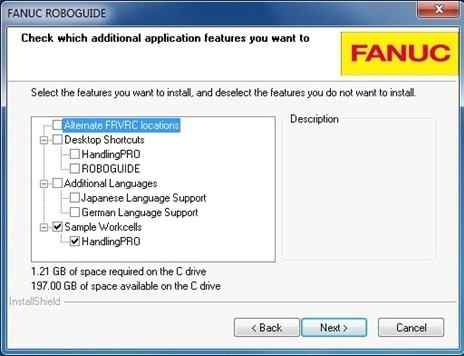
8)“FANUC ROBOGUIDE - 检查您要添加的其他应用程序功能”窗口显示。 选择要安装的功能,然后单击“下一步”按钮。

9)显示“ROBOGUIDE设置 - FANUC Robotics虚拟机器人选择”窗口。 选择虚拟机器人的版本,然后单击“下一步>”按钮。如果您点击“全选”按钮,所有版本都被选中。 如果单击“全部清除”按钮,则所有版本都未选中。

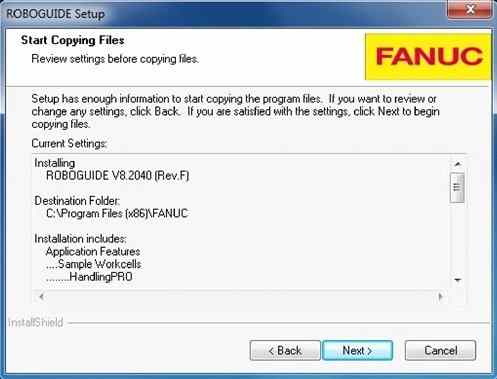
10)显示“ROBOGUIDE设置 - 开始复制文件”窗口。 检查安装设置,然后单击“下一步>”按钮。
【程序教学】
创建基本的TPP程序
通过慢跑机器人,手动输入或单击单元格中的对象来教导TPP位置。
支持MHPICK和PLACE位置的自动示教。
运动陈述,等待陈述支持。
单个正在运行的程序支持。稍后支持多个正在运行的程序。
打开/关闭手视图设置
打开/关闭手指令,使工作单元拾取和放置应用程序具有动画效果。
从CAD生成程序:在CAD文件中查找实体,并使用这些实体自动生成机器人程序。此功能可以大大减少编程时间。
【支持UTOOLS】
将工具图形附加到机器人上以进行打开和关闭成像。
定义UTOOL值。
【工作单元库】
基本CAD模型的CAD库
能够将自己的图像添加到库中
【创建多组和多轴机床】
轻松创建由机器人控制器电机驱动的机器。电机可以是扩展轴或多组定义的控制器配置。
【支持UFRAMES】
将UFRAMES与工作单元对象相关联。
相对于UFRAMES进行教学。允许移动带有零件/夹具的示教位置以检查范围。
快速将示教参考系从世界坐标更改为UFRAME坐标系。
有关如何操作软件的过程的广泛帮助
示例工作单元
完整的3D世界环境:具有缩放,平移和旋转功能。
具有图形化UIF组件的完全集成的环境可简化机器人单元的教学过程
流程浏览器。
广泛的工作单元教程
机器人慢跑:手臂拖放教学工具和传统的教学吊坠式慢跑结束。
单个机器人工作单元:支持多个机器人
百度网盘提取码:xtzj

 RISA 2D(二维分析设计软件)v16.01 免费版其他行业 / 170.5M
RISA 2D(二维分析设计软件)v16.01 免费版其他行业 / 170.5M
 Microsys Planets 3D Pro(行星3D望远镜)其他行业 / 195.6M
Microsys Planets 3D Pro(行星3D望远镜)其他行业 / 195.6M CAD画图急救箱(AutoCAD辅助软件)其他行业 / 1.4M
CAD画图急救箱(AutoCAD辅助软件)其他行业 / 1.4M 汇信联连3起航客户端其他行业 / 23.8M
汇信联连3起航客户端其他行业 / 23.8M 蒙泰喷绘软件其他行业 / 22.8M
蒙泰喷绘软件其他行业 / 22.8M 纬地道路设计软件7.0破解版其他行业 / 676.4M
纬地道路设计软件7.0破解版其他行业 / 676.4M 分享赚钱AI机器人其他行业 / 81.3M
分享赚钱AI机器人其他行业 / 81.3M KBminer(高性能GPU挖矿软件)其他行业 / 6.8M
KBminer(高性能GPU挖矿软件)其他行业 / 6.8M MATPool Miner(一键式挖矿工具)其他行业 / 1.3M
MATPool Miner(一键式挖矿工具)其他行业 / 1.3M 过客西游大战僵尸2辅助其他行业 / 1.4M
过客西游大战僵尸2辅助其他行业 / 1.4M












 中通快递管家v2.0.1.7 官方版其他行业 / 79.1M
中通快递管家v2.0.1.7 官方版其他行业 / 79.1M 中航证券至诚版网上交易系统v6.67 官方版其他行业 / 44.3M
中航证券至诚版网上交易系统v6.67 官方版其他行业 / 44.3M 中投证券合一版的最新电脑版v7.33 官方版其他行业 / 76.3M
中投证券合一版的最新电脑版v7.33 官方版其他行业 / 76.3M 矿山生产费用管理系统v1.0 官方最新版其他行业 / 7.8M
矿山生产费用管理系统v1.0 官方最新版其他行业 / 7.8M 信达证券通达信网上交易其他行业 / 85.3M
信达证券通达信网上交易其他行业 / 85.3M 信达证券同花顺网上交易系统其他行业 / 23.7M
信达证券同花顺网上交易系统其他行业 / 23.7M 幸运星全能抽奖软件其他行业 / 18.7M
幸运星全能抽奖软件其他行业 / 18.7M 兴e付电脑版其他行业 / 13.5M
兴e付电脑版其他行业 / 13.5M 单位社保费管理客户端其他行业 / 160.1M
单位社保费管理客户端其他行业 / 160.1M 易顺佳仓库管理系统其他行业 / 35.7M
易顺佳仓库管理系统其他行业 / 35.7M dyned电脑版(戴耐德英语软件)教育学习
dyned电脑版(戴耐德英语软件)教育学习 360游戏大厅v3.8.7.1021 最新版游戏平台
360游戏大厅v3.8.7.1021 最新版游戏平台 数独计算器v1.2 免安装版教育学习
数独计算器v1.2 免安装版教育学习 tl wr710n升级固件v1.130415官方版路由器类
tl wr710n升级固件v1.130415官方版路由器类 My Secret Folder(文件夹加密工具)加密解密
My Secret Folder(文件夹加密工具)加密解密 蓝蚂蚁qq金牌网吧破解版20175.7 免费版其他应用
蓝蚂蚁qq金牌网吧破解版20175.7 免费版其他应用 加密魔镜加密解密
加密魔镜加密解密 TGraphDisplay3D(图形编程软件)v1.0.59.202 官方版编程开发
TGraphDisplay3D(图形编程软件)v1.0.59.202 官方版编程开发 播客录播助手v2.3.0.1 官方版屏幕录像
播客录播助手v2.3.0.1 官方版屏幕录像 鲁ICP备2021036634号-4
鲁ICP备2021036634号-4